Underwater Wireless Communication
It is possible for radio frequency waves to propagate longer distances through sea water at very low frequencies(30 to 300 Hz). But this requires larger antenna and higher transmit power. This is not feasible. Moreover very high attenuation occurs using RF wave propagation technique in the ocean.
Optical waves are also affected by scattering losses. Moreover they can be used for shorter distances in the ocean.
As underwater wireless communication is not feasible using radio frequency(RF) and optical light based communication systems, it is carried out using acoustic waves.
As mentioned in the table-1 below, underwater acoustic communication links are classified based on range. Table mentions bandwidths used for different ranges in this type of communication. Acoustic links used in underwater wireless communications are of two types viz. vertical and horizontal. This is based on direction of the sound ray. Acoustic frequencies from 10Hz to 1MHz are used in underwater wireless communication.
| Link Type | Range in Km | Bandwidth in KHz |
|---|---|---|
| Very Long | 1000 | <1 td=""> |
| Long | 10 to 100 | 2 to 5 |
| Medium | 1 to 10 | ~ 10 |
| Short | 0.1 to 1 | 20 to 50 |
| Very Short | <0 .1="" td=""> | >100 |
Table-1: Acoustic communication range and bandwidth
There are two network topologies which can be used for underwater communication system viz. centralized and decentralized. In centralized architecture all the nodes(i.e. underwater(uw) sink) communicate using a central station(onshore sink or surface sink/station). Centralized architecture is very similar to cellular network architecture. In decentralized architecture, nodes communicate using their neighbors. Decentralized architecture is also known as adhoc network.
Underwater wireless communication network using acoustic waves
Underwater wireless communication network using acoustic waves
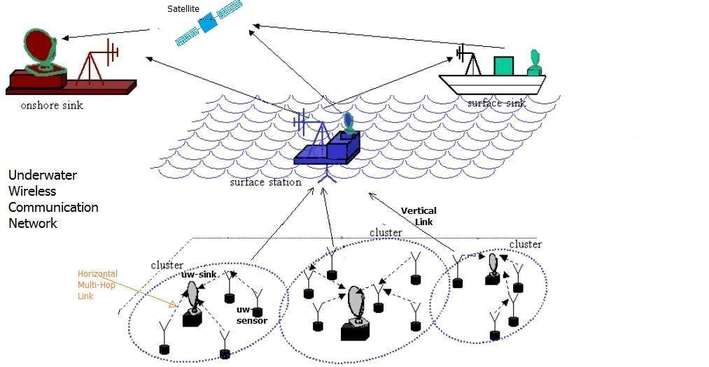
Figure-1 depicts centralized architecture of underwater communication system. As shown a group of sensor nodes are installed at the bottom of ocean. These nodes communicate with one or more underwater installed sinks(uw-sinks). These uw-sinks operate as relays between underwater nodes and surface station. As shown surface station communicates with surface sink and onshore sink using satellite links. Like land mobile communication, bottom area of ocean is divided into clusters. One uw-sink is installed or anchored in each of the clusters.
In order to achieve communication with both underwater nodes and also with surface station, uw-sink is equipped with two transceivers namely horizontal and vertical.
Horizontal transceiver provides communication between uw-sink and sensor nodes. Over these links commands/configuration data is sent from uw-sink to sensors. Moreover sensors collect the monitored data from uw-sink using these links. These horizontal transceivers are short range transceivers.
Vertical transceivers are used for long range communication between uw-sink and surface station as shown. These transceivers can cover distance of upto 10 km
Vertical transceivers are used for long range communication between uw-sink and surface station as shown. These transceivers can cover distance of upto 10 km
No comments:
Post a Comment